相較于閉源生態(tài),開源生態(tài)飛控具有可控性和兼容性強(qiáng)的優(yōu)勢,可以快速賦能產(chǎn)品研發(fā),并避免過度依賴單一企業(yè)的硬件生態(tài)或技術(shù)支持。以典型的Ardupilot和PX4開源協(xié)議為例,全球開發(fā)者社區(qū)活躍,擁有大量教程和插件,存在大量無人機(jī)、無人車、無人船開發(fā)案例。更利于產(chǎn)品快速開發(fā)驗(yàn)證,低成本起步,自主迭代。
2025年初,思翼科技受客戶團(tuán)隊(duì)邀請,模擬探討SIYI N7開源生態(tài)飛控在無人車船領(lǐng)域的新應(yīng)用,為無人車船產(chǎn)品快速開發(fā)提供新路徑。
微信截圖_17566905467764")
選擇有限 vs 場景復(fù)雜?行業(yè)級無人車控制痛點(diǎn)解析
相較于成熟的無人機(jī)飛控產(chǎn)品體系,無人車控制器選擇較為有限,同時(shí),地面作業(yè)地形復(fù)雜,磁場干擾較大,對操控穩(wěn)定性有較高的要求。通常來講,無人車控制存在以下痛點(diǎn):
1.復(fù)雜地形干擾下的精密控制:農(nóng)業(yè)/巡檢無人車地面作業(yè),斜坡、泥濘路面及障礙物較多,易出現(xiàn)軌跡偏移,對操控精度和響應(yīng)速度要求更高;
2.系統(tǒng)穩(wěn)定性與安全性:地面作業(yè)干擾更強(qiáng),控制器需保持高度穩(wěn)定、抗干擾能力強(qiáng),避免死機(jī)、卡頓等情況。
3.多元化功能拓展:無人車船場景需求多樣,如單一農(nóng)業(yè)無人車領(lǐng)域,存在巡檢、作業(yè)兩個(gè)大類,以作業(yè)為例,需兼容施肥、噴藥、收割等多功能模塊,需要控制器具備豐富的接口拓展能力。
4.有限的選擇空間:無論是無人車船控制器,還是控制軟件界面,相較于無人機(jī),選擇相當(dāng)有限。閉源控制器通常有匹配的操作系統(tǒng),但模塊集成度高,又不利于快速產(chǎn)品開發(fā),靈活性差,后續(xù)升級難。
微信截圖_17566906301067")
無人車地面作業(yè)地形復(fù)雜,干擾物較多
開源生態(tài)飛控遷移履帶型巡檢無人車控制探討
本次模擬常規(guī)履帶型智能巡檢無人車集成開發(fā),共選用五個(gè)核心部件,包含履帶型無人車*1、思翼UniRC 7高性能手持地面站及天空端、GPS模塊、N7開源生態(tài)飛控及A8mini云臺相機(jī)。N7飛控結(jié)合UniRC 7手持地面站,為巡檢無人車提供精準(zhǔn)作業(yè)操控,搭配GPS模塊,可應(yīng)用在對定位要求較低的巡檢領(lǐng)域(如精度要求高,建議搭配思翼RTK定位定向模塊及RTK基站)。A8mini云臺相機(jī)可提供基礎(chǔ)4K 6x變焦的巡檢視野。
思翼N7開源生態(tài)飛控支持Ardupilot及PX4開源協(xié)議,自帶多旋翼、固定翼、無人車/船三大基礎(chǔ)固件,可賦能無人車廠商實(shí)現(xiàn)5min快速集成調(diào)參。進(jìn)入思翼官網(wǎng),下載《N7飛控 Ardupilot固件包》,解壓縮至本地路徑。下載MP地面站,選擇并安裝已下載固件包中的“Rover”固件,即可快速實(shí)現(xiàn)固件配置。

配置好參數(shù)后,通過簡單的加速度計(jì)校準(zhǔn)和指南針校準(zhǔn)、遙控器按鍵設(shè)置,可快速投入簡單使用,從線路連接到校準(zhǔn)完成,全程不超過5min。(為減少磁場干擾,加速度計(jì)和指南針校準(zhǔn)界面應(yīng)攜帶無人車整車進(jìn)行旋轉(zhuǎn)校準(zhǔn),本次模擬中僅旋轉(zhuǎn)N7飛控及GPS模塊進(jìn)行模擬)。開發(fā)完成后,一線飛手可直接通過UniGCS地面站軟件進(jìn)行控制,像操控手機(jī)一樣控制無人車,更簡單,更專業(yè)。
相較于無人車船控制器市場,無人機(jī)飛控市場及產(chǎn)品更加成熟,選擇面更廣。開源無人機(jī)飛控快速部署無人車船應(yīng)用,可大幅縮短約60%開發(fā)周期。得益于無人機(jī)飛控的成熟市場,飛控接口往往更豐富,可快速接入紅外相機(jī)、激光雷達(dá)、流量傳感器等一系列設(shè)備,應(yīng)用拓展性更強(qiáng),且算法成熟、多IMU冗余,抗干擾能力和穩(wěn)定性也有保障。為無人車船廠商產(chǎn)品快速研發(fā)提供了另一條路徑。
微信截圖_17566908296312")
SIYI N7 開源生態(tài)飛控,強(qiáng)勁算力 穩(wěn)定控制 減少復(fù)雜地形干擾
本次模擬項(xiàng)目中采用的SIYI N7開源生態(tài)飛控,搭載STM32H743IIK6主處理器和STM32F103協(xié)處理器,具備雙精度浮點(diǎn)運(yùn)算單元(DSP&FPU),高達(dá)480MHz主頻、2MB閃存、1MB內(nèi)存,帶來強(qiáng)大的運(yùn)算能力和高速數(shù)據(jù)處理能力,穩(wěn)定操控有保障。
微信截圖_17566909376617")
強(qiáng)勁M7內(nèi)核,H7雙精度浮點(diǎn)運(yùn)算
為適應(yīng)惡劣環(huán)境和突發(fā)事項(xiàng),N7開源生態(tài)飛控內(nèi)置雙IMU冗余設(shè)計(jì)、GPS模塊磁力計(jì)與飛控板載磁力計(jì)雙冗余設(shè)計(jì),內(nèi)置加熱電阻保障飛控IMU在低溫環(huán)境下依然能保持恒溫工作,安全可靠性更強(qiáng)。有效減少單IMU或磁力計(jì)損壞導(dǎo)致的安全風(fēng)險(xiǎn)。
微信截圖_17566909885611")
雙IMU冗余 + 雙磁力計(jì)冗余,IMU恒溫控制
支持RTK定位定向,賦能復(fù)雜作業(yè)精準(zhǔn)控制
搭配思翼RTK定位定向模塊,SIYI N7開源飛控在網(wǎng)絡(luò)RTK或思翼F9 RTK基站端的幫助下,可實(shí)現(xiàn)厘米級定位定向,大幅減弱地面斜坡、泥濘、障礙等干擾,在農(nóng)業(yè)作業(yè)、精細(xì)化巡檢等精工細(xì)作領(lǐng)域,賦能無人車提高作業(yè)精準(zhǔn)度。
微信截圖_1756691041564")
搭配RTK模塊,通過基站或網(wǎng)絡(luò)RTK,實(shí)現(xiàn)厘米級定位定向
以農(nóng)業(yè)植保無人車為例。基于Ardupilot的Rover固件支持自主導(dǎo)航、運(yùn)動控制、傳感器集成功能。通過MAVLink協(xié)議二次開發(fā),無人車廠商可自定義開發(fā)農(nóng)藥噴灑控制邏輯,并兼容高清可見光相機(jī)、多光譜相機(jī)等觀察作物走勢。基于RTK模塊賦予的厘米級定位能力,和航點(diǎn)航線規(guī)劃、自動航線功能,實(shí)現(xiàn)高精度自動作業(yè)。
微信截圖_17566912719594")
通過MAVLink二次開發(fā)實(shí)現(xiàn)無人車高精度自動作業(yè)
航點(diǎn)航線規(guī)劃,一鍵生成作業(yè)路徑
N7開源生態(tài)飛控支持自動航線功能,用戶可根據(jù)地圖信息提前規(guī)劃航點(diǎn)航線,一鍵啟動,一鍵返航,自動實(shí)現(xiàn)作業(yè)任務(wù),科學(xué)規(guī)劃作業(yè)路徑,以覆蓋更大的巡檢/播撒面積,提高作業(yè)效率和效果。
微信截圖_17566913341531")
UniGCS 地面站軟件,像玩手機(jī)一樣操控?zé)o人車船
相較于生態(tài)較為完善的無人機(jī)低空經(jīng)濟(jì)領(lǐng)域,無人車船領(lǐng)域的地面站操控軟件更加稀少。主流的幾款閉源控制器適配閉源軟件,與硬件強(qiáng)綁定,且二次開發(fā)難度大。思翼科技推出的UniGCS地面站軟件,除無人機(jī)外,進(jìn)一步兼容無人車船控制。整體界面較傳統(tǒng)開源地面站軟件更簡潔美觀,更親民,采用類手機(jī)和ipad的軟件交互界面,調(diào)試、指引一目了然,新手也能快速上手。
微信截圖_17566914047870")
更符合移動端操作邏輯的快速控制測試界面
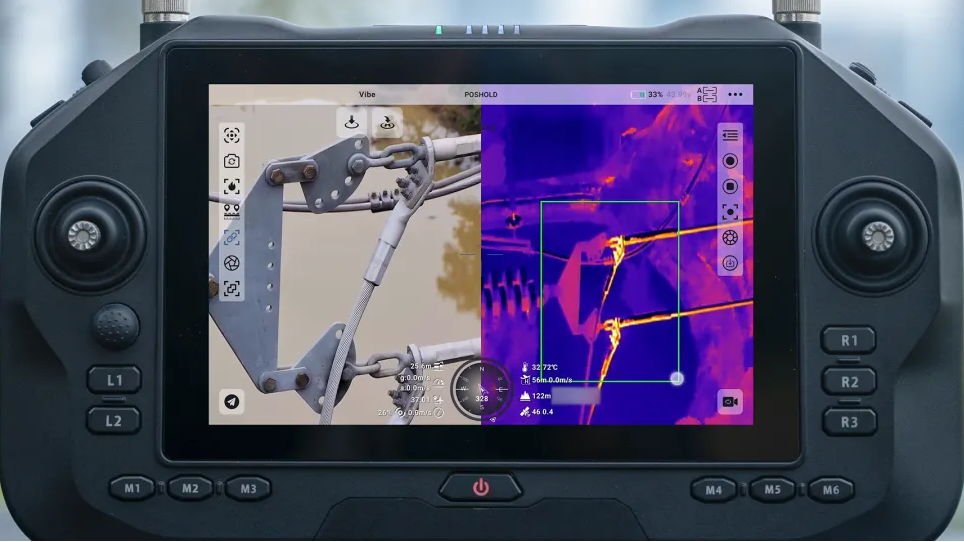
為了開發(fā)出一款更“好用”“易用”的地面站軟件,UniGCS開發(fā)之初調(diào)研了大量一線操作人員的建議和操作習(xí)慣,具備豐富特定功能,更貼合使用場景。以巡檢中的吊艙控制為例,通過UniGCS,操作人員可快速啟動AI跟蹤跟隨、可見光/紅外分屏、紅外測溫、一鍵云臺回中、偽彩模式、激光測距、畫面翻轉(zhuǎn)、自定義電子圍欄等功能,有效提升無人車船操控手感。
微信截圖_17566914564477")
特定功能:180°畫面翻轉(zhuǎn)
作為一款發(fā)布一年有余的產(chǎn)品,SIYI N7開源生態(tài)飛控已被應(yīng)用在低空經(jīng)濟(jì)領(lǐng)域的方方面面,并開始向無人車船領(lǐng)域加速滲透。作為思翼混源開放生態(tài)的一部分,賦能無人機(jī)、無人車、無人船企業(yè)加速產(chǎn)品迭代與創(chuàng)新。
掃一掃關(guān)注公眾號